|
|
|
|
Robot, dos grados de libertad |
Contenido:
Introducción.
Control del manipulador.
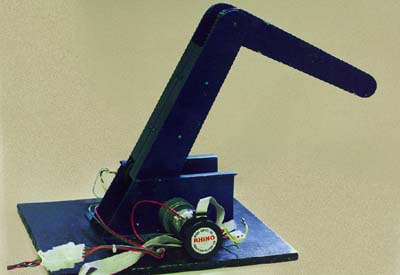
El manipulador de dos grados de libertad que se encuentra en el Laboratorio de Control
tiene una configuración planar. Está formado por dos elementos unidos por
uniones de revolución y el último elemento está actuado a distancia.
Los actuadores son motores de corriente directa que se acoplan al elemento por medio de
una transmisión de potencia con una alta reducción de velocidad; y la
posición del eje del motor se mide por medio de un encodificador óptico.
Las dimensiones de los elementos y los rangos de movimientos asociados a cada unión
producen el espacio de trabajo mostrado en la figura 1.
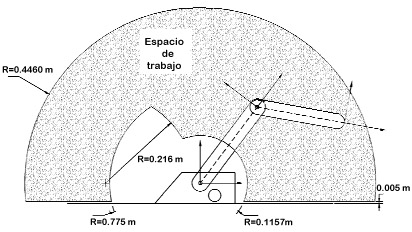
Fig.1 Espacio de trabajo.
Los análisis del manipulador (cinemático y dinámico) se realizaron
considerándolo como una estructura complementamente rígida y despreciando la
dinámica de los actuadores asi como los efectos no-lineales de la transmisión
de potencia.
|
|
|
|
Comentarios o Sugerencias: webmaster@control10.fi-p.unam.mx