|
|
|
|
Robot, dos grados de libertad |

Fig.2 Conexiones.
Como se puede ver en la figura 2, aparte de la fuente de alimentación y la interfase de potencia, se emplea una tarjeta dSPACE (ds1102 con un TMS320C30/40MHz) para controlar el manipulador. Toda la programación se escribió en "C" como un primer paso, después por medio de la Interfase de Tiempo Real (RTI) de Simulink (MatLab) se podrá incorporar rutinas generadas automáticamente. El software permite la adición de algoritmos de control sin cambiar la estructura general de la programación; y por medio del programa "Cockpit" se tiene una interfase gráfica en la operación del manipulador.
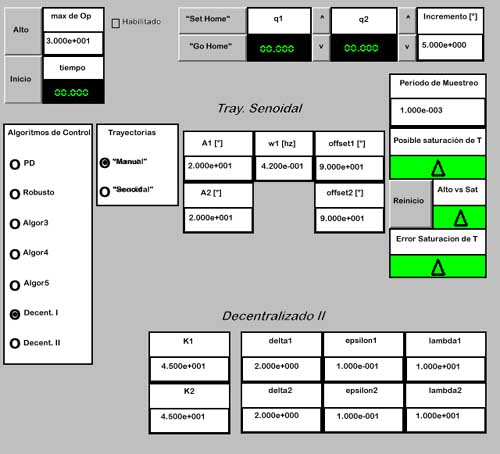
Fig.3 Interfase gráfica
Se han implementado varios algoritmos de control en la ds1102 para controlar el
manipulador, como por ejemplo: PD + compensación gravitatoria, par calculado,
control robusto, control adaptable, control decentralizado, etc. En todos los
algoritmos solo la posición está disponible para la retroalimentación
y la velocidad se estima por medio de un filtro.
|
|
|
|
Comentarios o Sugerencias: webmaster@control10.fi-p.unam.mx